高精度針孔檢測設(shè)備
More >>
2022-11-08 16:20:47 精質(zhì)視覺
1 線陣相機(jī)選型
線陣相機(jī)是機(jī)器視覺領(lǐng)域中一種特殊的圖像采集設(shè)備。由于它的傳感器只有一行感光元件,因此可以實(shí)現(xiàn)高掃描頻率和高分辨率。面陣相機(jī)在采集運(yùn)動(dòng)物體照片時(shí)會(huì)產(chǎn)生模糊圖像,而線陣相機(jī)卻很好的避免了這種情況。線陣相機(jī)的典型應(yīng)用領(lǐng)域是對(duì)金屬、塑料、紙和纖維等連續(xù)的材料進(jìn)行采集,被拍攝的物體通常以勻速運(yùn)動(dòng)。利用一臺(tái)或多臺(tái)相機(jī)對(duì)其逐行連續(xù)掃描,以實(shí)現(xiàn)整個(gè)表面均勻檢測。另外由于傳感器的高分辨率,線陣相機(jī)也非常適合測量場合,它可以準(zhǔn)確測量到微米級(jí)。
本文根據(jù)技術(shù)要求及“相機(jī)橫方向分辨率=橫向視野范圍大小/相機(jī)像素精度”,求得相機(jī)橫向像素個(gè)數(shù)需大于 2700,即 4096 個(gè)像素。通過以下公式求得了行頻參數(shù),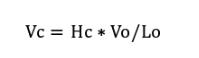
其中 Hc:線陣相機(jī)的每線像素?cái)?shù)(單位:pixel),Lo:檢測物體的寬幅(單位:m),Vo:檢測物體運(yùn)動(dòng)速度(單位:m/s),Vc:行頻(單位:Hz,即 線/s)。求得本系統(tǒng)行頻需大于 4096Hz。因此,本文選用了海康威視數(shù)字技術(shù)股份有限公司生產(chǎn)的 CMOS 高速彩色工業(yè)線陣相機(jī) MV-CL042-70GC,如下圖所示。
相機(jī)參數(shù)如下:
2 鏡頭選型
在機(jī)器視覺表面缺陷檢測系統(tǒng)中,鏡頭與相機(jī)的組合對(duì)于中密度板表面缺陷圖像的質(zhì)量有著直接的影響,相機(jī)成像原理如上圖 所示。在采集圖像時(shí),鏡頭必須能夠完整的照亮相機(jī)的傳感器區(qū)域,以避免陰影和漸暈的產(chǎn)生。鏡頭的光學(xué)分辨率越好,可以再現(xiàn)出越精細(xì)的結(jié)構(gòu)。對(duì)于工業(yè)鏡頭,一般可分為以下三類:標(biāo)準(zhǔn)分辨率鏡頭、微距鏡頭、遠(yuǎn)心鏡頭,不同類型的鏡頭應(yīng)用場合也不相同。本文在確定了工作距離、視場大小和傳感器尺寸之后,可以通過以下公式求得工業(yè)鏡頭的焦距 ?:
式中,WD 表示拍攝距離,指鏡頭與拍攝目標(biāo)的距離;PMAG 表示鏡頭放大倍數(shù),指相機(jī)傳感器大小與視場大小之比。根據(jù)本研究中的實(shí)際需要,本文選用焦距為25mm 的工業(yè)鏡頭。工業(yè)鏡頭如下圖所示:
鏡頭的主要參數(shù)如下表所示:
3 光源選型
光照系統(tǒng)是中密度板表面缺陷檢測系統(tǒng)中一個(gè)重要的環(huán)節(jié)之一,它決定著系統(tǒng)的檢測結(jié)果與分割質(zhì)量,失敗的照明系統(tǒng)會(huì)導(dǎo)致缺陷細(xì)節(jié)信息的丟失。由于相機(jī)是通過采集檢測目標(biāo)的反射光來構(gòu)成圖像。因此,在進(jìn)行光源的選型時(shí),首先要考慮到所有影響光線反射的外界因素,如檢測對(duì)象的材料、大小、形狀及顏色等。其次是光源的顏色及亮度,對(duì)比度差和照明不均勻的圖像會(huì)影響直接系統(tǒng)的識(shí)別準(zhǔn)確率。對(duì)于某些缺陷,在使用特定顏色光進(jìn)行照明時(shí),也會(huì)提高系統(tǒng)的識(shí)別準(zhǔn)確率。
本研究選用海康威視公司生產(chǎn)的工業(yè)線形光源 MV-LTDS-1200 及其控制器,如上圖所示。該光源功率為 104W,256 級(jí)亮度調(diào)節(jié)。MV-LTDS-1200 及其控制器主要參數(shù)如下表所示。
4 主機(jī)選型
主機(jī)的主要作用是軟件的載體,本文的軟件系統(tǒng)包含神經(jīng)網(wǎng)絡(luò)算法,因此 GPU是主機(jī)的一個(gè)主要參數(shù)。若將 CPU(中央處理器)稱為 PC 的大腦,則 GPU(圖形處理單元)便是它的靈魂。與 CPU 相比,GPU 將復(fù)雜的任務(wù)分解為成千上萬個(gè)單獨(dú)的任務(wù)來并行處理,因此這使 GPU 成為圖形計(jì)算的理想選擇。從體系結(jié)構(gòu)上講,CPU僅由幾個(gè)內(nèi)核組成,這些內(nèi)核具有大量可以同時(shí)處理幾個(gè)軟件線程的緩存。而 GPU由數(shù)百個(gè)可以同時(shí)處理數(shù)千個(gè)線程的核心組成。在 AI 中,GPU 已成為稱為“深度學(xué)習(xí)”的技術(shù)的關(guān)鍵。深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)含有大量數(shù)據(jù),訓(xùn)練它們執(zhí)行任何人類程序員都無法描述的復(fù)雜任務(wù)。實(shí)驗(yàn)主機(jī)參數(shù)如下表所示:
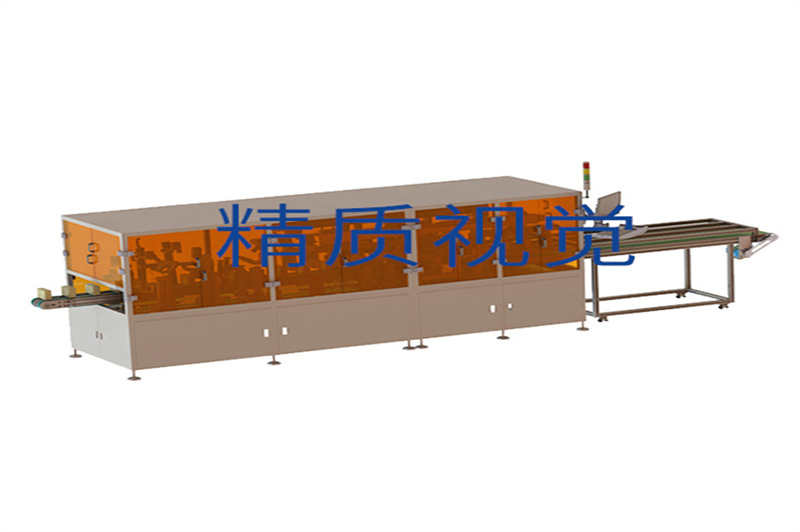
5 平臺(tái)搭建
本研究搭建的圖像采集平臺(tái)如下圖所示,平臺(tái)由相機(jī)、光源、勻速傳送臺(tái)、光電開關(guān)、主機(jī)等模塊組成。平臺(tái)可采集不同速度下的板材圖像,相機(jī)、光源的高度與距離可自由調(diào)整,為接下來的實(shí)驗(yàn)提供了方便。平臺(tái)將供后續(xù)軟件開發(fā)、深度學(xué)習(xí)算法數(shù)據(jù)采集、深度學(xué)習(xí)算法實(shí)驗(yàn)與評(píng)估使用。
6 尺寸標(biāo)定
本文基于長寬為 0.35 米的標(biāo)定板對(duì)圖像采集平臺(tái)的線陣相機(jī)像素點(diǎn)進(jìn)行了尺寸標(biāo)定工作,標(biāo)定樣圖如下圖 所示。通過如下公式確定了相機(jī)的主要參數(shù)。
式中,Resolution表示相機(jī)橫向分辨率;Di表示標(biāo)定圓直徑的實(shí)際尺寸;di 表示標(biāo)定圓直徑的像素尺寸;n 表示標(biāo)定圓數(shù)量。最終確定了相機(jī)橫向分辨率為0.25mm/pixel;橫向視野范圍為 1.02 米。